PID regulátory se nejčastěji používají k ovlivnění určitých měřených veličin. Jako chytré regulátory 3 v 1 se každý den osvědčují v mnoha průmyslových systémech a regulují velmi přesně na požadovanou hodnotu. Zde se dozvíte nejdůležitější fakta a údaje o PID regulaci.
Digitální PID regulátor lze univerzálně programovat a parametrizovat díky integrovanému mikroprocesoru. Funguje proporcionálně, integračně a derivačně (PID) s intenzitou jednotlivých složek přizpůsobenou regulačnímu procesu. To se provádí dimenzováním regulačních parametrů
Princip PID regulátoru je poměrně jednoduchý. Ať už se jedná o PID regulátor teploty nebo PID regulátor vlhkosti, regulátor se vždy snaží upravit konkrétní regulovanou veličinu na požadovanou hodnotu na základě skutečné hodnoty. P-složka zesiluje regulační odchylku, I-složka v případě existující regulační odchylky zvýší svoji výstupní úroveň a D-složka působí proti pohybu skutečné hodnoty. Složky, které nejsou pro regulaci požadované, lze deaktivovat. V závislosti na aplikaci jsou pak provozovány PI-regulátory, P-regulátory, PD-regulátory nebo I-regulátory.
Pro většinu aplikací má nejlepší regulační vlastnosti struktura PID. Například kompaktní PID regulátory jsou velmi rozšířené v oblasti regulace teploty, umožňují i přímé připojení odporových teploměrů a termočlánků. Některé řízené proměnné vyžadují deaktivaci určitých regulačních složek, např. rychlost a průtok.
P-složka reaguje velmi rychle a zesiluje regulační odchylku; její trvalá regulační odchylka má negativní účinek. Příslušným regulačním parametrem je proporcionální pásmo Xp. S nižší hodnotou Xp je regulace rychlejší a regulační odchylka menší. Celkový systém má však tendenci stále více oscilovat.
I-složka eliminuje regulační odchylku. Při nižší hodnotě integrační konstanty Tn je akční zásah regulátoru dosažen rychleji a také se rychleji vyrovná regulační odchylka. Při příliš nízké hodnotě však dochází k oscilacím.
D-složka působí proti pohybu skutečné hodnoty. Pro regulátor topení to znamená, že je snížena proporce při zvýšení skutečné hodnoty a zvýšena při snížení skutečné hodnoty. Popsané chování má tlumící účinek. Příslušným regulačním parametrem je derivační konstanta Tv. Vyšší hodnota Tv popsaný účinek zvyšuje.
Chování regulačních systémů vždy závisí na pracovním bodu. Před optimalizací je proto nutné zařízení uvést do provozního stavu, pro který se později očekávají příznivé regulační parametry. Pokud musí být během optimalizace specifikována požadovaná hodnota, měla by být v provozním rozsahu.
Pokud existují srovnatelná zařízení / regulační smyčky, lze tam na zkoušku použít známé regulační parametry. Není-li tento přístup dostatečný, lze použít jednu z následujících optimalizačních metod.
Oscilační metoda podle Zieglera a Nicholse
Tato metoda se používá pro relativně rychlé regulační systémy. Pro přípravu se parametrizuje P-složka, u které se nastaví poměrně velká hodnota XP. Požadovaná hodnota v pozdějším pracovním rozsahu je definována na následujícím obrázku.
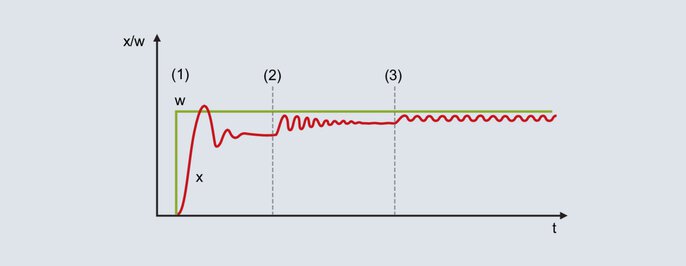
Obr. 52: Požadovaná a skutečná hodnota při použití oscilační metody
S relativně velkou hodnotou proporcionálního pásma přechází skutečná hodnota na koncovou hodnotu s nízkou tendencí k oscilacím [obrázek 52 (1)]. V důsledku neexistující I-složky je přítomna trvalá regulační odchylka.
XP je redukováno (obrázek 52 [2]): skutečná hodnota se zvyšuje a přechází na koncovou hodnotu s větší tendencí k oscilacím. Proporcionální pásmo lze snižovat do doby, až skutečná hodnota trvale osciluje (obrázek 52 [3]). Proporcionální pásmo potřebné pro tuto reakci se označuje XPk (kritické Xp) a musí být stanoveno co nejpřesněji (není vhodné snižovat Xp v příliš velkých krocích).
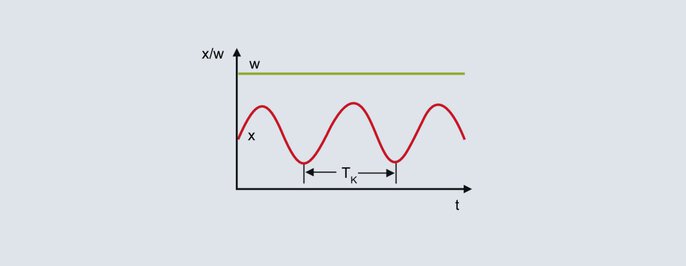
Kritická perioda
Z kontinuální oscilace skutečné hodnoty na horním obrázku je stanovena kritická perioda TK, která slouží k určení druhého parametru procesu. Kritickou periodu TK (v sekundách) lze určit např. z časového intervalu mezi 2 minimálními hodnotami. Parametry XPk a TK jsou vloženy do následující tabulky pro určení požadované regulační struktury:
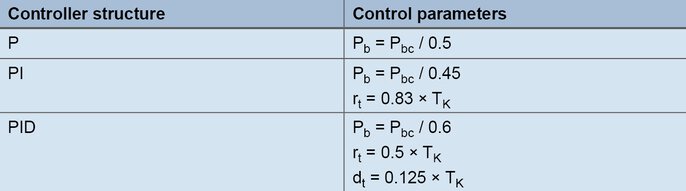
Vzorce pro nastavení podle oscilační metody
Postup metodou skokové odezvy Chien-Hrones-Reswic
Touto metodou lze určit regulační parametry relativně rychlým způsobem i pro pomalé regulační systémy. Metoda se používá pro regulační systémy 2. řádu a vyšší a nabízí unikátní vlastnost rozlišení vzorců pro povelovou a poruchovou odezvu. U obecných vzorců se koeficient přenosu řízeného systému, doba zpoždění a doba kompenzace určují ze skokové odezvy.
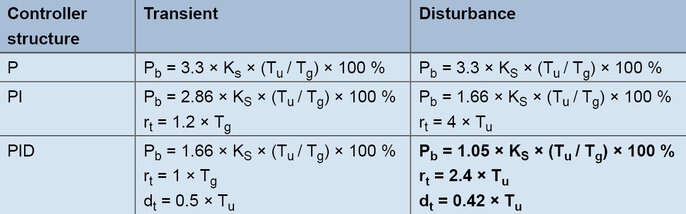
Vzorce pro nastavení podle skokové odezvy
Příklad:
Pro laboratorní pec má být použit digitální regulátor s PID strukturou. Cílem je dosáhnout dobré poruchové odezvy, typická požadovaná hodnota je 200 °C. V ručním režimu je postupně zvyšován akční zásah, dokud skutečná hodnota není mírně pod pozdější požadovanou hodnotou (v každém případě je nutné počkat na kompenzační procesy). Například teplota 180 °C je dosažena při výstupní úrovni 60 %. Počínaje 60 % se akční zásah v krocích zvyšuje na 80 % a zaznamenává se skutečná hodnota.
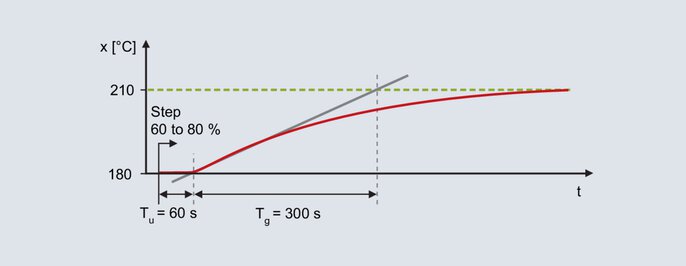
Skoková odezva laboratorní pece
Skoková odezva je stanovena pomocí tečny: doba zpoždění Tu = 60 s, doba kompenzace Tg = 300 s. Přenosový koeficient regulačního systému je stanoven ze změny poměru skutečné hodnoty a skoku výstupu.

Rovnice 22
Použitím obecných pravidel jsou výsledkem následující parametry poruchové odezvy:

Rovnice 23

Rovnice 24

Rovnice 25
Výstupní skok musí být proveden v rozsahu následujícího pracovního bodu. Výška skoku musí být zvolena tak velká, aby bylo možné vyhodnotit křivku skutečné hodnoty. Po zadání výstupního skoku je nutné počkat na koncovou hodnotu skutečné hodnoty; časově nenáročnou alternativou je postup podle rychlosti náběhu.
Postup podle rychlosti náběhu
Postup je stejný jako pro metodu skokové odezvy. Před skokovou změnou je specifikován akční zásah, se kterým je skutečná hodnota mírně pod následnou požadovanou hodnotou.
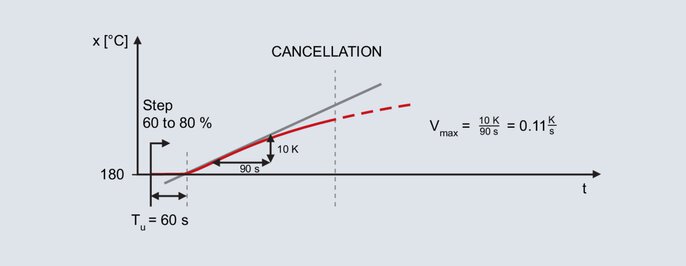
Křivka skutečné hodnoty pro metodu podle rychlosti náběhu
Nastavení se opět provádí pro již zmíněnou laboratorní pec; pozdější pracovní bod je 200 °C. Zadáním akčního zásahu 60 % v ručním režimu je získána skutečná hodnota 180 °C. Akční zásah je postupně zvyšován až na 80 %.
Po přednastavení skoku se skutečná hodnota po nějaké době zvýší. Záznam pokračuje, dokud skutečná hodnota nedosáhne maximální strmosti. Také u této metody je zakreslena tečna a je určena doba zpoždění. Druhým parametrem je maximální rychlost náběhu, která odpovídá sklonu tečny. Maximální rychlost náběhu je určena gradientem trojúhelníkem v místě tečny:

Rovnice 26
Zjištěné hodnoty Vmax (0,11 K/s) a Tu (60 s) jsou použity v následujících rovnicích:
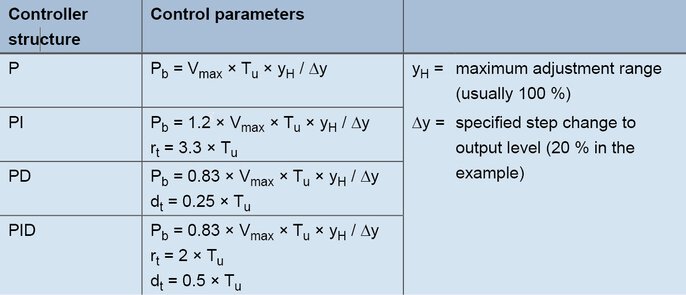
Vzorce pro nastavení podle rychlosti náběhu
Pro PID regulátor lze hodnoty získat pomocí vzorců následovně:

Rovnice 27

Rovnice 28

Rovnice 29
Empirická metoda pro stanovení regulačních parametrů
Touto metodou lze postupně určit vhodná nastavení pro složky P, D a I. Na počátečním stavu (akční zásah 0 %) je nutné specifikovat typickou požadovanou hodnotu; proto může být tato metoda použita pouze pro relativně rychlé regulační systémy (např. rychlé systémy regulace teploty a proměnné typu rychlost nebo průtok).
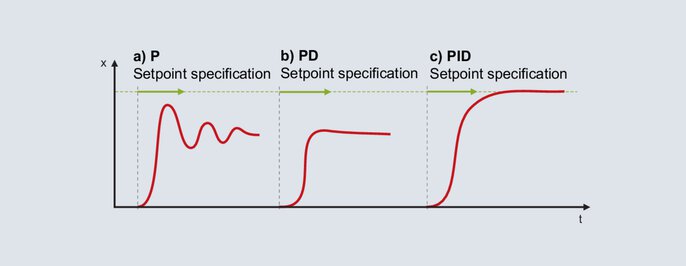
Nastavení PID regulátoru podle empirické metody
Pro digitální regulátor je aktivována P-struktura. Proporcionální pásmo je nastaveno poměrně velké (dimenzování závisí na řízeném systému) a požadovaná hodnota je zadána v pozdějším provozním rozsahu. Skutečná hodnota přechází pomalu na koncovou hodnotu a vzniká poměrně velká regulační odchylka. Následně je specifikována požadovaná hodnota se stále klesajícím proporcionálním pásmem XP. Cílem je Xp, při kterém skutečná hodnota dosáhne své stabilní koncové hodnoty po dvou až třech úplných oscilacích (obrázek 56a). Pro tlumený rozběh se struktura přepne z P na PD. Počínaje malým nastavením derivační konstanty je požadovaná hodnota specifikována se stále rostoucí Tv. V momentě dosažení skutečné hodnoty své koncové hodnoty s nejmenší možnou oscilací, je určena vhodná Tv (obrázek 56b).
Poznámka: Jakmile regulátor nastaví akční zásah na 0 % (i pouze jednou během uvádění do provozu), je hodnota Tv příliš vysoká .
Pro přechod na strukturu PID se aktivuje I složka. Integrační konstanta Tn je obvykle nastavena na čtyřnásobek hodnoty dříve stanovené Tv. Obrázek 56c ukazuje chování pro nastavení Tn = 4 × Tv.
Pro některé systémy nelze aktivovat všechny složky regulátoru. Pokud má P-struktura za následek nestabilní chování i pro vysokou hodnotu XP, nelze použít ani P- ani D-strukturu. Je nutné použít I-strukturu regulátoru.
Pokud při úspěšné optimalizaci regulátoru s P-strukturou zavedení D-složky způsobí nestabilitu regulační smyčky, použije se PI-struktura.
Použití prezentovaných optimalizačních metod s největší pravděpodobností povede ke stabilním, ale ne optimálním reakcím regulace. Ruční doladění dále zlepší výsledek. Pokud lze reakce PID regulátoru přiřadit jedné z křivek 62b až 62e, pokyny pro další optimalizaci jsou uvedeny dále.
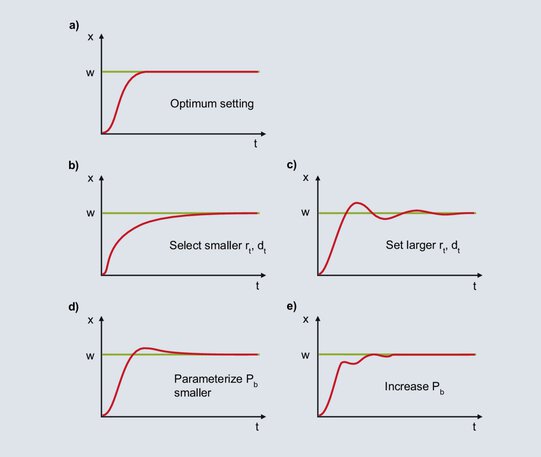
Obr. 62: Poznámky k dodatečnému ladění PID regulátoru
Diagram ukazuje optimální reakce PID regulátoru.
Po zadání požadované hodnoty se skutečná hodnota strmě zvyšuje, dokud není dosaženo proporcionálního pásma. Když měřená hodnota dosáhne proporcionálního pásma, P-složka se snižuje a I-složka zajistí dosažení požadované hodnoty. Vzhledem k poměrně velkému nastavení Tn je nárůst I-složky pomalý a regulační odchylka je eliminována po delší době. Pro rychlejší reakci musí být Tn nastaveno menší; Tv je nutné také snížit v poměru Tv/Tn = 1/4.
Jakmile skutečná hodnota dosáhne proporcionálního pásma, I-složka zvýší akční zásah. Zvyšování pokračuje, dokud procesní hodnota nedosáhne požadované hodnoty. V zobrazeném případě I-složka vytváří příliš velký náběh, dokud není odstraněna regulační odchylka a procesní hodnota nepřekročí požadovanou hodnotu. Při záporné systémové odchylce se akční zásah snižuje příliš rychle, skutečná hodnota klesá pod požadovanou hodnotu atd. Symetrické kolísání skutečné hodnoty kolem požadované hodnoty značí, že Tn je nastaveno příliš malé. Hodnotu Tn je třeba zvýšit; Tv je nutné také zvýšit v poměru Tv/Tn = 1/4.
I-složka je tvořena od vstupu skutečné hodnoty do proporcionálního pásma až do odstranění regulační odchylky. Kvůli velkému nastavení Xp se I-složka vytváří již při velké regulační odchylce. Vzhledem k velké regulační odchylce na začátku tvoří I-složka svůj akční zásah poměrně rychle. Po odstranění regulační odchylky je I-složka příliš velká a skutečná hodnota překročí požadovanou hodnotu. Při menším nastavení Xp začíná I-složka vytvářet akční zásah odpovídajícím způsobem pomaleji, pouze s menšími regulačními odchylkami. Znázorněné jednorázové překročení je méně pravděpodobné.
Pokud je hodnota XP nastavena příliš nízká, akční zásah P-složky se sníží krátce před dosažením požadované hodnoty. Když se skutečná hodnota dostane do proporcionálního pásma, P-složka se sníží a skutečná hodnota klesne. V důsledku větší regulační odchylky se akční zásah zvyšuje a skutečná hodnota stoupá. V proporconálním pásmu vedou malé změny skutečné hodnoty k velkým změnám akčního zásahu, což má za následek vysokou tendenci k oscilacím. Tlumení se dosáhne zvýšením proporcionálního pásma.


